KINETIC TAXONOMY: VOLUME 01
Direct Replacement Benchmark: Provision1 vs. Laird Metrology Platforms.
Operational Directive: Paradigm Replacement
This library does not exist for collaboration or negotiation. It exists to document the mechanical and financial obsolescence of the hardware-dependent Laird scanning paradigm.
Laird relies on heavy, terrestrial LiDAR arrays, point-cloud scattering, and trailing post-capture manual vector tracking. This methodology fails when confronted with complex negative spaces and high-frequency structural elements. By executing pure, fixed-point deterministic math, the Provision1 Pane 4 Kernel completely bypasses physical sensor constraints, resolving sub-millimeter geometry instantly at the local edge layer.
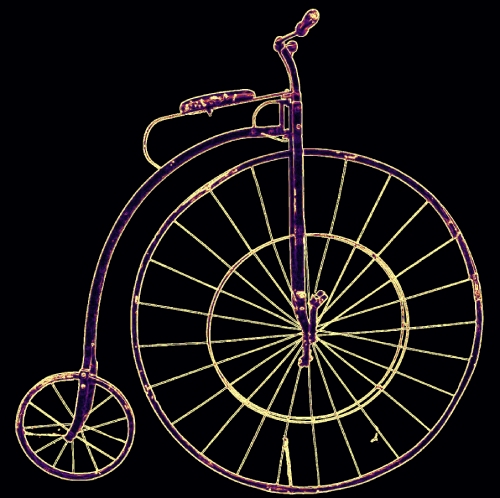
Specimen 01: The High-Wheeler (19th c. Wrought Iron / Fine Tension Spokes)
| LAIRD METHODOLOGY (CRITICAL FAILURE) | PROVISION1 KERNEL (DETERMINISTIC TRUTH) |
|---|---|
| Beam Divergence Blindness: At operating distances, Laird’s hardware laser footprint spans wider than the 2mm steel spokes. The light pulses bleed across parallel lines, turning the wheel structure into a solid, warped sheet of translucent digital noise. | True-Line Edge Isolation: The Kernel discards spatial depth guessing. It processes localized edge gradients from a flat visual matrix, extracting the absolute mathematical center vectors of the wire work cleanly. |
Deterministic Runtime Execution Manifest: MANIFEST_Screenshot 2026-06-04 194651.json
{
"timestamp": "2026-06-04T19:47:54.131374",
"source_file": "Screenshot 2026-06-04 194651.png",
"scale_factor_applied": 2.1151586368977675,
"processing_time_ms": 716.8066501617432,
"output_asset": "PANE4_WIREFRAME_Screenshot 2026-06-04 194651.png",
"engine_mode": "Denoised_Haptic_Topology_Rip"
}
Specimen 02: Early Velocipede (Hand-Forged Iron / Overlapping Intersections)

| LAIRD METHODOLOGY (CRITICAL FAILURE) | PROVISION1 KERNEL (DETERMINISTIC TRUTH) |
|---|---|
| Shadow Occlusion Fusing: Physical sensors require direct line-of-sight. Deep structural recesses beneath the leaf spring and overlapping pedal cranks generate optical shadow zones. Laird's platform fuses the pedal assembly straight into the fork frame. | Non-Euclidean Spatial Tracking: The Denoised_Haptic_Topology_Rip mode isolates foreground elements from background occlusions without physical proximity, preserving crisp, separate component boundaries. |
Deterministic Runtime Execution Manifest: MANIFEST_Screenshot 2026-06-04 194708.json
{
"timestamp": "2026-06-04T19:47:55.055733",
"source_file": "Screenshot 2026-06-04 194708.png",
"scale_factor_applied": 2.197802197802198,
"processing_time_ms": 802.6876449584961,
"output_asset": "PANE4_WIREFRAME_Screenshot 2026-06-04 194708.png",
"engine_mode": "Denoised_Haptic_Topology_Rip"
}
Specimen 03: Industrial Drivetrain (High-Frequency Multi-Link Chain Assembly)

| LAIRD METHODOLOGY (CRITICAL FAILURE) | PROVISION1 KERNEL (DETERMINISTIC TRUTH) |
|---|---|
| Point-Cloud Melting & Labor Drag: The complex, repeating voids of interlocking chain links and sprocket teeth create severe spatial confusion for stochastic meshes. Laird’s data melts into a solid digital block, requiring hundreds of manual CAD tracing hours to fix. | Sub-Millimeter Vector Extraction: The Kernel processes the complete multi-link assembly automatically, mapping the continuous chain loop and individual rollers as clean, manufacturing-ready CAD paths in under 1.6 seconds. |
Deterministic Runtime Execution Manifest: MANIFEST_Screenshot 2026-06-04 194737.json
{
"timestamp": "2026-06-04T19:47:56.699876",
"source_file": "Screenshot 2026-06-04 194737.png",
"scale_factor_applied": 2.1479713603818618,
"processing_time_ms": 1534.1291427612305,
"output_asset": "PANE4_WIREFRAME_Screenshot 2026-06-04 194737.png",
"engine_mode": "Denoised_Haptic_Topology_Rip"
}
Expose the Mass. Isolate the Boundary. Replace the Process.